Commits on Source (320)
Showing
- .gitattributes 1 addition, 0 deletions.gitattributes
- .gitignore 8 additions, 0 deletions.gitignore
- .gitlab-ci.yml 116 additions, 12 deletions.gitlab-ci.yml
- .pypirc 9 additions, 0 deletions.pypirc
- README.md 9 additions, 5 deletionsREADME.md
- TestFiles 1 addition, 1 deletionTestFiles
- docker/Dockerfile 17 additions, 0 deletionsdocker/Dockerfile
- docker/Makefile 21 additions, 0 deletionsdocker/Makefile
- docs/Makefile 20 additions, 0 deletionsdocs/Makefile
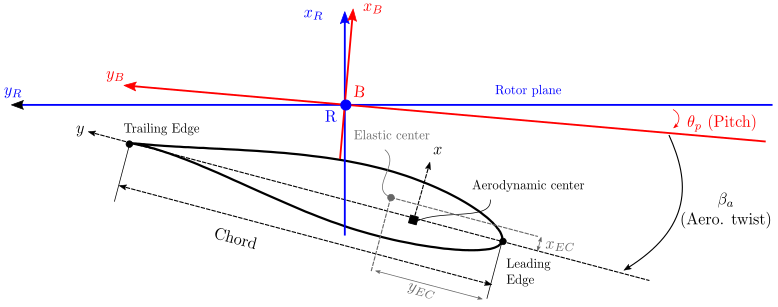
- docs/bladed/Bladed_airfoil.png 0 additions, 0 deletionsdocs/bladed/Bladed_airfoil.png
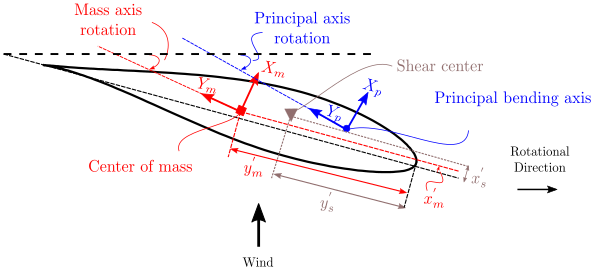
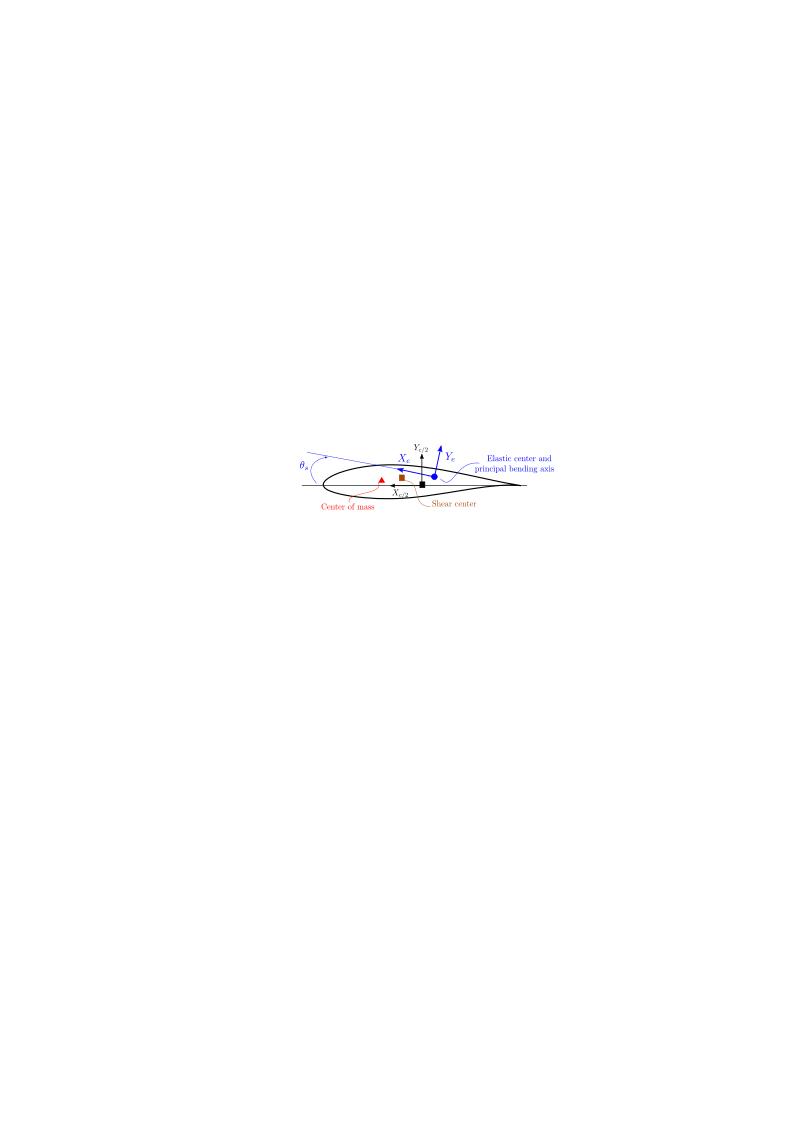
- docs/bladed/Bladed_st_centers.png 0 additions, 0 deletionsdocs/bladed/Bladed_st_centers.png
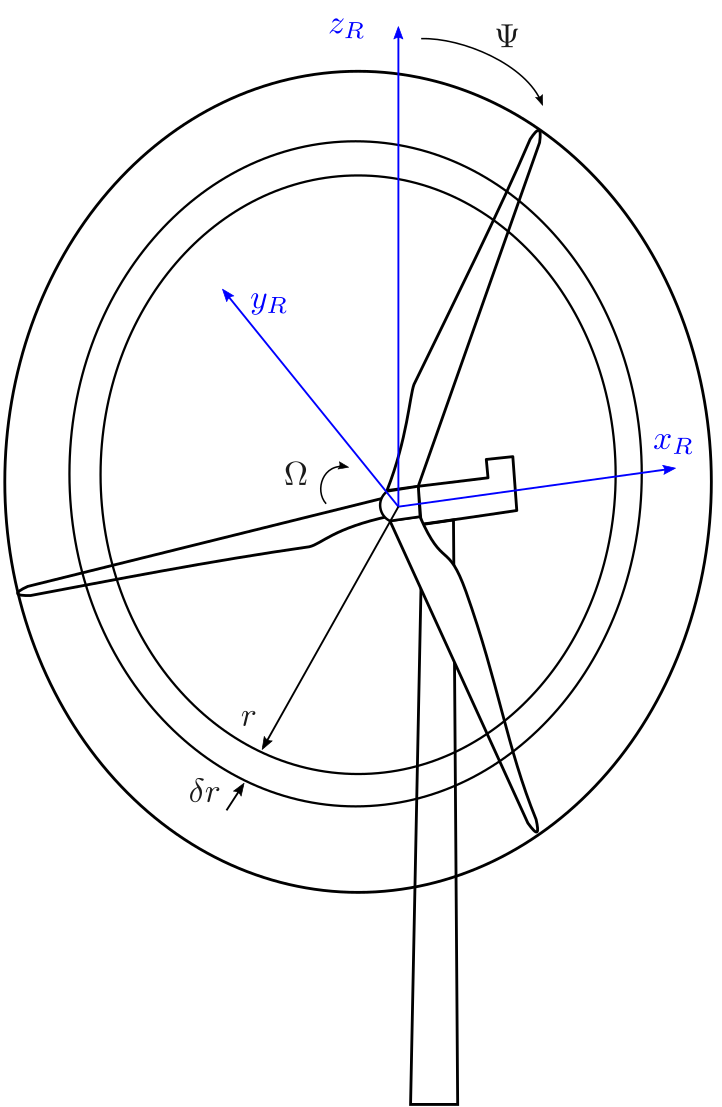
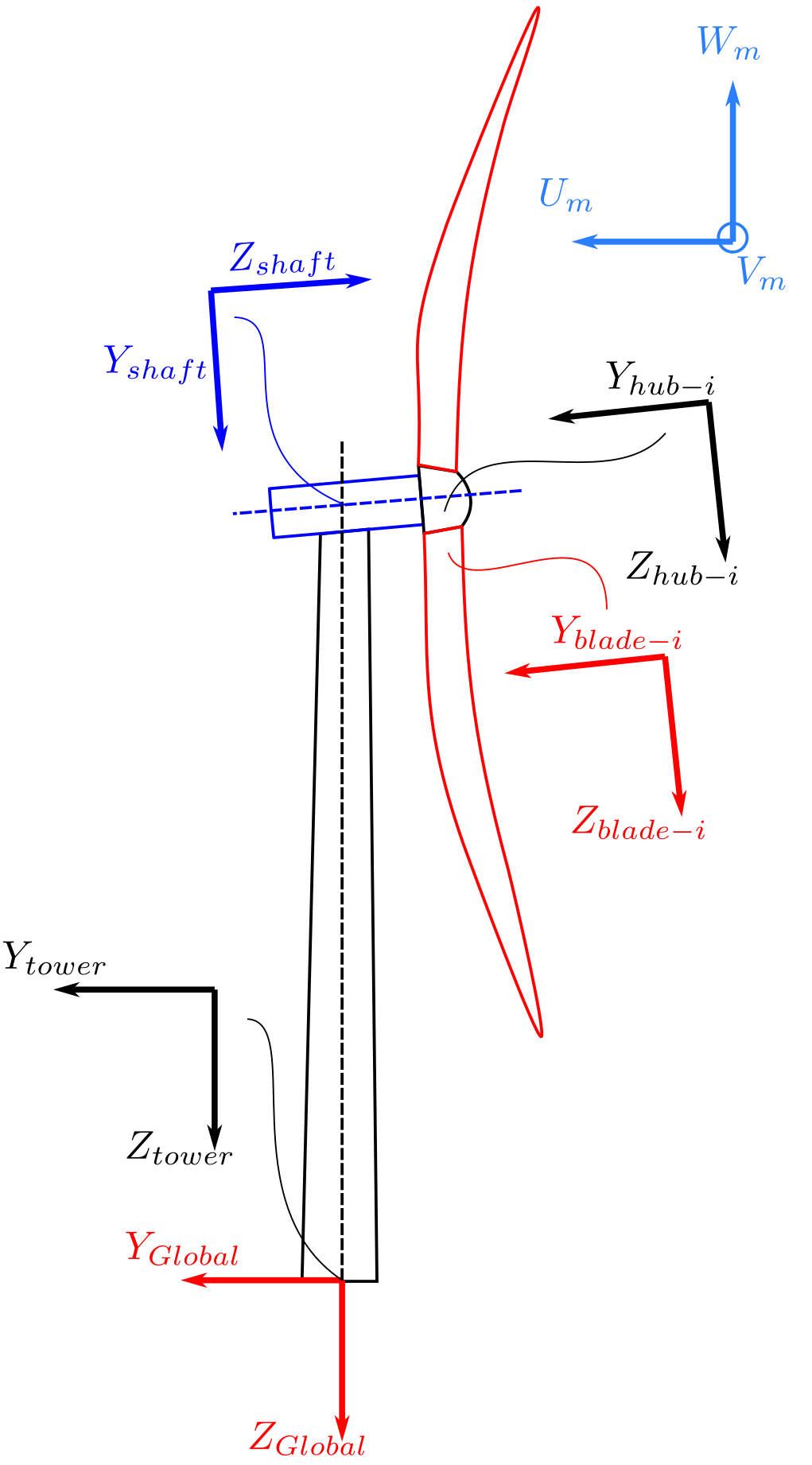
- docs/bladed/Bladed_turbine_coord.png 0 additions, 0 deletionsdocs/bladed/Bladed_turbine_coord.png
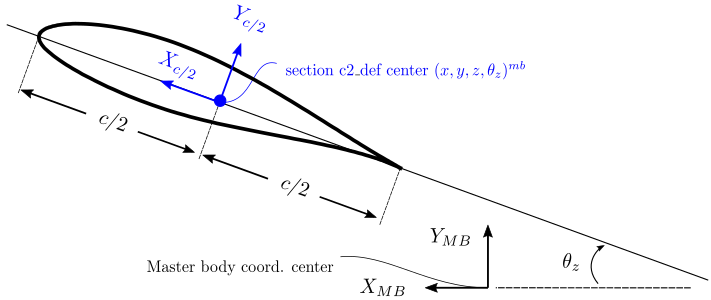
- docs/bladed/HAWC2_c2_def_ccord.png 0 additions, 0 deletionsdocs/bladed/HAWC2_c2_def_ccord.png
- docs/bladed/HAWC2_st_centers.png 0 additions, 0 deletionsdocs/bladed/HAWC2_st_centers.png
- docs/bladed/HAWC2_turbine_coord.png 0 additions, 0 deletionsdocs/bladed/HAWC2_turbine_coord.png
- docs/bladed/bladed2hawc.ipynb 86 additions, 0 deletionsdocs/bladed/bladed2hawc.ipynb
- docs/bladed/bladed2hawc.rst 185 additions, 0 deletionsdocs/bladed/bladed2hawc.rst
- docs/conf.py 187 additions, 0 deletionsdocs/conf.py
- docs/developer-guide.md 36 additions, 50 deletionsdocs/developer-guide.md
- docs/fatigue.rst 13 additions, 0 deletionsdocs/fatigue.rst
.gitattributes
0 → 100644
.pypirc
0 → 100644
docker/Dockerfile
0 → 100644
docker/Makefile
0 → 100644
docs/Makefile
0 → 100644
docs/bladed/Bladed_airfoil.png
0 → 100644
{kind=link}
46.8 KiB
docs/bladed/Bladed_st_centers.png
0 → 100644
{kind=link}
43.6 KiB
docs/bladed/Bladed_turbine_coord.png
0 → 100644
{kind=link}
123 KiB
docs/bladed/HAWC2_c2_def_ccord.png
0 → 100644
{kind=link}
38.3 KiB
docs/bladed/HAWC2_st_centers.png
0 → 100644
{kind=link}
15.1 KiB
docs/bladed/HAWC2_turbine_coord.png
0 → 100644
{kind=link}
121 KiB
docs/bladed/bladed2hawc.ipynb
0 → 100755
docs/bladed/bladed2hawc.rst
0 → 100644
docs/conf.py
0 → 100644
docs/fatigue.rst
0 → 100644